

フィジカルAIがもたらす産業とロボティクスの地殻変動、なぜ日本企業にとって「待ったなしの生存戦略」となるのか?(日立Physical AI Dayレポート)
- 小宮 昌人 / Komiya Masahito

- 5 日前
- 読了時間: 19分
日立Physical AI Dayセッション「Panel Discussion:フィジカルAIは何をもたらすのか~脳・神経・身体が切り拓く次の産業像~」レポート
近年、生成AIの進化スピードは目を見張るものがある。テキストによる自然な対話を行う「Chatbots(チャットボット)」から、高度な問題解決力を備える「Reasoners(推論器)」へと成熟し、さらに自律的に目的を達成する「Agents(AIエージェント)」の導入が進みつつある。
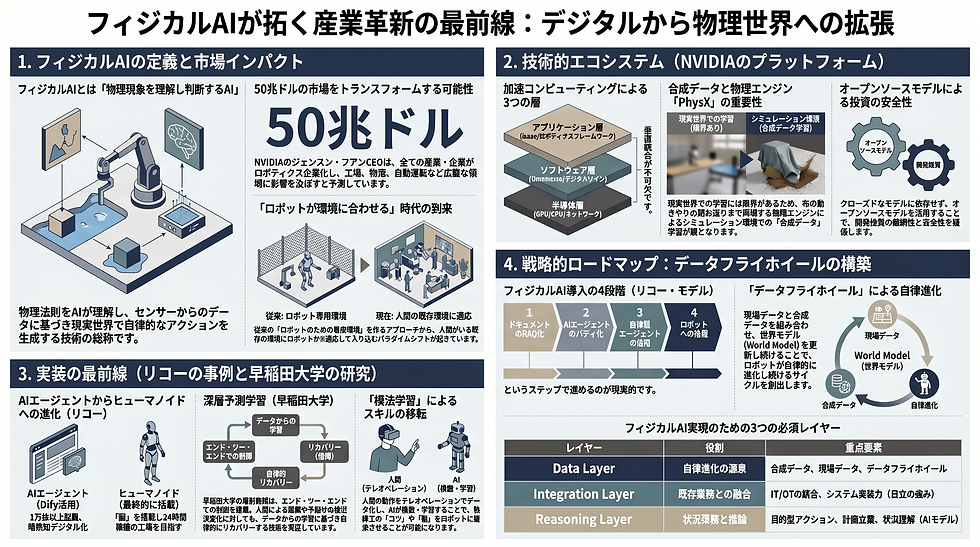
そして今、最も熱い注目を集めているのが、デジタル空間の知能を物理世界(フィジカル)へと結合させる「フィジカルAI(Physical AI)」である。ロボットや自動運転車などが現実世界で活動するために必要な知識を学習し、物理法則を理解した上で複雑なシナリオを自律的に実行するこの技術は、工場や物流、社会インフラ、さらにはヒューマノイドロボットなど、50兆ドル規模にのぼる巨大な産業領域をトランスフォーム(変革)する可能性を秘めている。
本稿では、最先端のフィジカルAIプラットフォームを提供するグローバルITベンダー、現場革新を実践する精密機器・電子機器メーカー、そしてディープラーニングとロボティクス研究をリードする学術機関や総合電機メーカーによる議論をもとに、フィジカルAIの技術的本質、業務における具体的な活用アプローチ、そして実装に不可欠な条件を網羅的かつ詳細に解説する。
フィジカルAIの定義とプラットフォーム戦略:物理現象を理解する「知能」
「すべての産業・企業がロボティクス企業になる」時代の到来
フィジカルAIの本質は、テキストや画像といったデジタル情報に留まらず、「物理現象をAIが深く理解し、それに基づいた適切な判断とアクションを自律的に実行すること」にある。このコンセプトは、NVIDIA CEOがGTCなどの国際舞台で「フィジカルAIの時代がついに到来し、すべての産業・企業はロボティクス企業になる」と宣言したことで、一気に火がついた。
フィジカルAIが変革をもたらす対象は極めて広範であり、スマートファクトリー、物流センター、自律移動型のヒューマノイドロボット、そして自動運転システムといった物理世界全般に及ぶ。
ハードウェアからアプリケーションにわたる3層のプラットフォーム
フィジカルAIを社会実装するためには、高度な演算処理を行う半導体だけでなく、ソフトウェアライブラリやアプリケーションフレームワークを包括した強固なシステムプラットフォームが不可欠となる。具体的には、以下の3つのレイヤーが有機的に結合することで機能する。
ハードウェア層:超並列処理を可能にするGPUを基盤としながら、CPU、そしてそれらを結合する超高速ネットワーク層からなる。
ソフトウェア層:現実世界とデジタル世界を極めて高い精度で同期・再現するデジタルツイン(シミュレーションプラットフォーム)である「Omniverse(オムニバース)」などが位置する。
アプリケーション層:ロボットの自律的な制御や学習を司るアプリケーション開発フレームワークである「Isaac(アイザック)」などが提供される。
オープンソース(オープンモデル)コミットメントの決定的な意義
昨今の生成AIのトレンドとして、多くの先端AIモデルが「クローズド(ブラックボックス化)」へと向かう傾向がある。しかし、産業界や実社会でフィジカルAIを安全に稼働させるためには、モデルやデータがオープンであることが決定的に重要である。
もしシステムや学習モデルが完全にクローズド化されてしまうと、企業がこれまで多大なリソースを割いて構築してきた開発環境や投資が、プラットフォーマーの方針転換一つで突然無効化(形骸化)してしまうリスクを孕む。
NVIDIAを筆頭とするプラットフォーマーが、AIモデルやシミュレーションライブラリを「オープンソース」としてコミットし続けることは、デベロッパーの投資保護のみならず、何よりも実環境における「システムの安全性・堅牢性の担保」に直結する。
物理現象の完全再現を支える「PhysX(フィジックス)」と合成データ
フィジカルAIをトレーニングする際、現実世界(リアル)のデータ収集だけに頼るのには限界がある。ロボットが転倒して破損するリスク、あるいは危険な環境でのデータ収集が困難であるためだ。ここで鍵となるのが、シミュレータ上で大量に自動生成される「合成データ(Synthetic Data)」の活用である。
シミュレーション空間において、単にグラフィックが綺麗であるだけではフィジカルAIの学習には不十分だ。例えば、ロボットアームが布(衣服)を掴もうとした際、布がアームをすり抜けてしまうような非物理的な挙動(バグ)が発生しては、実世界での制御には全く役に立たない。
そこで、バックエンドに位置する物理シミュレーションエンジン「PhysX(フィジックス)」などの技術が極めて重要な役割を果たす。
布の大規模シミュレーション:Tシャツのように柔らかく、不定形にたわむ布製品の挙動を、物理法則に基づいてシミュレーション空間で正確に再現する。
土や砂利の跳ね返り挙動:不整地を移動する車輪やクローラー型ロボットをトレーニングする際、地面の砂利がどのように跳ね、土がどのように崩れるかといった微細な物理反応を再現する。
テレオペレーションによる強化学習:人間が遠隔でロボットを操作(テレオペレーション)したデータをシミュレータに取り込み、強化学習(Reinforcement Learning)を重ねることで、ロボットに自律的な適応力を身に付けさせる。
これらのテクノロジーにより、デジタル空間(バーチャル)で学習したAIが、そのまま滑らかに現実世界(リアル)に適応(アタッチ)できるようになる。これこそが、アクセラレーテッドコンピューティングが実現するフィジカルAIの本質である。
現場革新のロードマップ:オフィスから工場、そして「多能工ヒューマノイド」へ
精密機器・電子機器メーカー大手であるリコーなどの先進企業では、フィジカルAIを用いた「現場革新」の壮大なロードマップを具現化しつつある。そのグランドデザインは、「まずオフィスワークの領域でAIエージェントを自社開発して配属し、そこで磨いた知能を最終的にヒューマノイドロボットなどの物理的な身体に移植して、工場の24時間自動運転を実現する」というものである。
「暗黙知」のアーカイブから始まった市民開発と、その先に現れた「運用の壁」
現場革新の第一歩として直面するのが、熟練社員たちが長年の経験や勘で培ってきた、言葉で説明しきれない「暗黙知」をいかにしてデジタル化し、企業の知的資産としてアーカイブするかという課題である。
この課題に対し、リコーは内製開発した簡易AIエージェント構築用ローコードツール「Defy」を全社員に展開し、プログラミング知識を持たない一般社員が自らのノウハウを反映したAIエージェントを自作する「市民開発」を実践した。本格展開から約1年で、社内に配属(導入)されたAIエージェントの数は一時1万体を超える規模に達した。
しかし、ここで産業界に共通する大きな課題が浮き彫りとなった。それが「ローコードツールの脆弱性と運用の壁」である。 簡単なルールやRAGで組み立てられたAIエージェントは、業務フローやシステムの仕様が少しでも変更されると即座にエラーを起こし、動作しなくなる。結果として、開発した本人によるメンテ負担が増大し、約半年が経過すると使われなくなって形骸化するエージェントが続出したのである。リコーでも、不要なエージェントを整理・淘汰したところ、一挙に1,000体規模が削除される事態となった。
「自律型・主体型エージェント」へのコペルニクス的転換
この運用の壁を乗り越えるために登場したのが、「自律型・主体型エージェント」への転換である。これは、人間が細かな処理手順をプログラミングするのではなく、エージェントに対して「この業務を行いたい」と自然言語(テキスト)で目標(ゴール)を提示すると、AI側が自発的に判断する仕組みである。
エージェント自身が「分かりました。私の持つスキルや、別のシステムの情報を組み合わせて、自動的に処理して報告します」と、主体的に動く。 社員は、まるで「バディ(相棒)」と会話するように指示を出すだけで、自身の頭の中にあった暗黙知を対話を通じてAIに自然と移転・知識化できるようになる。これにより、RAGでの参照、NeMo Curator等を用いた自己改善型エージェントによる自動クレンジング、LMS(Large Multimodal Model)の高度な組み合わせが進み、企業のデジタル情報資産の流動性は爆発的に向上している。
ワールドモデルの構築と「多能工ヒューマノイドロボット」の社会実装
オフィスで蓄積された高度な意思決定能力(脳)は、いよいよ「フィジカルな現場」へと実装される段階に至っている。現場の異常を検知したとき、「物理的に誰がマシンの停止ボタンを押すのか」という実問題に答えるためである。
現実世界(物理現場)を仮想空間に取り込むアプローチは、以下のように極めてシンプルかつ高度に統合されている。
現場のキャプチャ:リコーが開発する全天球カメラ**「THETA(シータ)」**などを用いて、工場の稼働環境を360度くまなく撮影する。
ワールドモデルの構築:収集した映像・画像データから周囲の3次元空間を丸ごと把握する「ワールドモデル」を構築し、仮想空間(シミュレータ)へと寸分違わぬ形で移植する。
模倣学習と物理シミュレーション:人間と同等の動体性能を持つヒューマノイドロボットを仮想空間に配置し、人間の熟練動作を模倣学習(Imitation Learning)させる。
従来の産業用ロボットは、単一の作業(例えば溶接、ネジ締めのみ)を特定の位置で繰り返す「単能工」であった。しかし、フィジカルAIを搭載したヒューマノイドや次世代アーム型ロボットが目指すのは、「多能工」としての完全自律化である。
「自律的に移動し、対象の電子部品をカメラで認識してピッキングし、組み立てを行い、完成品を自ら搬送する」といった、連続する複数工程を1台のロボットがすべてシミュレーション学習のみから習得する。この多能工ロボットの自社工場ラインへの本格展開は、すでに2年後を見据えた具体的なマイルストーンとして進行している。
【ライブデモで実証】人型ロボットの最先端動体性能
実験室レベルを超え、実機におけるデモ映像やライブ実演で示された自律型人型ロボットの動きは、従来のロボット制御とは次元が異なる。
抜群のバランス保持性能:指令に応じて滑らかに前進歩行するだけでなく、その場で後退(バック)し、さらに片足を高く上げる変則的なポーズをとっても、一切転倒することなく重心を自律制御し続ける。
器用なマニピュレーション:配置された荷物をロボットハンドで正確に掴み(把持)、アームを動かしてスムーズに持ち替え、最後に人間の手元へ優しく手渡す。
これらの動作は、熟練操作者の動きをロボットへ「転写」する技術によって成り立っている。実機操作のビデオ映像(End-to-End)と、操作デバイスから送られる高精度のテレメトリデータ(テレムデータ)の双方をAIモデルに高効率で学習させることで、リアルタイムかつアドホックな物理制御を実現している。
深層予測学習(Deep Predictive Learning):予期せぬ状況変化を自律リカバリーする
総合電機大手の日立製作所と、早稲田大学などの学術機関による産学連携の取り組みは、現在の生成AIブームよりはるか以前、ディープラーニングのロボット工学応用黎明期である2014年〜2015年頃から約10年間にわたり継続されている。彼らが一貫してこだわり続けてきたのが、「AIとロボットをEnd-to-End(エンド・ツー・エンド)で繋ぎ、全身の物理的な制御を行う」という先進的な挑戦である。
万博での連続4,300回衣服畳みと、ワイヤーハーネス取り付けの実績
この長期の共同研究は、産業の現場において極めて具体的な実績を残している。
ワイヤーハーネス取り付けの精密デモ:自動車や産業機器の製造工程で、最も自動化が困難とされる「極細で柔軟、不定形なワイヤー配線の取り付け」を、全身協調制御によって極めて緻密に成功させた。
「服を畳み続ける」自律デモ:洗濯物の山から無作為に衣類を掴み出し、それを広げて綺麗に畳み続けるロボットを万博(プレイベント等を含む)にて実演。ライブデモという「失敗が許されない公開環境」において、4,300回以上もエラー停止することなく連続して服を畳み続ける驚異的な安定性を記録した。
「ルール記述なし」で自己修復・リカバリーする予測学習の強み
この高度な制御を支える基礎技術が、共同開発された「深層予測学習(Deep Predictive Learning)」である。
従来のロボットアームのプログラミングでは、「もし外部から力が加わって位置がずれたら、Xミリだけ戻す」といった条件分岐(ルールベース)の命令を人間が気の遠くなるほど細かくコードで書き下す必要があった。しかし、深層予測学習では、このような明示的なプログラムを一切記述しない。すべてデータからの学習のみで構築されている。
そのため、ロボットが精密な作業を行っている途中で、人間が強引にロボットアームを引っ張って邪魔をしたり、対象物の位置をずらしたりしても、アームは自律的に「現在のずれ」を物理センサーと視覚から検知し、自ら動作軌道を補正して元の作業へと復帰(セルフ・リカバリー)する。
【深層予測学習(Deep Predictive Learning)の判断モデル】
[現在および過去の状態(画像+物理テレメトリ)]
↓
[時時刻刻(コンティニュアス)に「未来の物理状態」を予測・出力]
↓
[予測される未来と目標のズレを計算し、モーター出力を連続制御]
↓
[人間がアームを引っ張るなどの「邪魔(外乱)」が入っても自動リカバリー]
この技術の根底にあるのは、入力に対して「一発で単一の答えを出す」という静的なアプローチではない。時時刻刻と変化する現実世界の中で、常に連続的(コンティニュアス)に未来の状態を予測し、現在の行動判断をアップデートし続けるダイナミックなアプローチである。
このアプローチは、世界最高峰の学術誌『Science』の姉妹誌である『Science Robotics』の論文として掲載され、日本人のみの著者構成としては極めて異例となる「表紙(カバー)」を飾るという、歴史的な学術的・実用的評価を獲得した。
データの「ダイナミズム」:数ヶ月単位で激変する価値
深層予測学習や模倣学習を実装する上で、開発企業や研究者が最も頭を悩ませるのが「どのデータを収集すればよいのか」という点である。驚くべきことに、その正解は現在進行形で変化している。
ハードウェアや大規模モデル(基盤モデル)の進化速度があまりにも早いため、「わずか数ヶ月前には、ノイズだらけで使い物にならないと破棄していた汚いデータ」が、最新の学習モデルを適用した途端に「極めて有用なデータとして即座に動作に反映される」という大転換(パラダイムシフト)が当たり前に起きる。
したがって、フィジカルAI開発における決定的な競争優位性は、「過去の固定化されたやり方で、ただ膨大なデータを静的に溜め込むこと」にはない。「変化し続ける最新モデルに合わせ、今その瞬間に必要なデータをダイナミックに収集・検証できる環境を構築し、超高速で学習サイクルを回し続けること」こそが、勝敗を分けるポイントとなる。
AIロボティクスの社会実装に向けた「3大必須条件」
フィジカルAIを単なる概念実証(PoC)で終わらせず、実際のビジネスや社会インフラに深く根付かせるためには、何が必要なのか。そのためのフレームワークとして、以下の「3つの必須条件(レイヤー)」**が提唱されている。
(1) データフライホイール(Data Flywheel)
現場データと合成データを組み合わせ、世界モデルで自律進化する好循環
(2) インテグレーションレイヤー(System Integration)
既存の業務システム、設備、そして何より「OTシステム」との完全統合
(3) リーズニング(Reasoning)
物理現象の因果関係を状況理解・推論し、目的型でアクションを計画
(1) データフライホイール(Data Flywheel)の創出
現実の泥臭い現場から集めてくる実データ(リアル)と、高度な物理シミュレーションによって生成される高精度な合成データ(バーチャル)を有機的に組み合わせ、学習ループに流し込む。 ロボットが現実世界で試行錯誤した結果が再びデータとしてシミュレーションにフィードバックされ、AIモデル(世界モデル:World Model)が自律的に学習をアップデートし続ける。この「自己進化の好循環(フライホイール)」をシステムとして回し続ける環境の創出が第1の条件である。
(2) インテグレーションレイヤー(System Integration)の構築
どれほど優れたAI知能や高性能なロボットアームが存在したとしても、それらが既存の生産ラインや社内の基幹システム、物理設備と繋がらなければ、産業用としては全く価値を生まない。 特に、現場のリアルタイム制御を支える**「OT(Operation Technology:制御・運用技術)」システム**に対して、AIの出力データや学習ループを滑らかに融合させていくインテグレーションが不可欠となる。この「OTとITの高度な融合」こそが、産業用ソリューションの真骨頂である。
(3) リーズニング(Reasoning:推論・状況理解)の獲得
ロボット自身が「今、目の前の空間で、物理的にどのような因果関係が発生しているのか」を正しく認識(状況理解)し、それに基づいて「次に何をすべきか」を判断(推論)し、全体のゴールから逆算して行動手順を組み立てる(計画立案:Planning)能力である。 このリーズニングが「目的型(Goal-oriented)」で実装されて初めて、ロボットは人間から「あそこの工具を片付けておいて」といった抽象的な命令(プロンプト)を受けただけで、自律的に工具の位置を特定し、障害物を避け、片付け作業を完遂できるようになる。
日立製作所が保有する鉄道車両や電力設備といった過酷な「エッジ(物理現場)」と、NVIDIAなどが提供する高度な「シミュレーション」「学習」のテクノロジーが結びつくことで、この3大条件を満たした超高速のデータフライホイールが現実のものとなりつつある。
フィジカルAIの段階的導入アプローチ:何から手をつけるべきか?
「自社でもフィジカルAIを導入したいが、あまりにも技術が高度でどこから始めればよいか分からない」という企業も多い。実務におけるアプローチとして、開発現場および企業の成熟度に応じた現実的なステップが提示されている。
若手デベロッパーのボトムアップアプローチ
現在のロボティクス開発の現場は、バックグラウンドが非常に多様(バラバラ)な人材が越境して活躍する時代となっている。伝統的な機械工学やロボット制御の出身者だけでなく、画像処理技術者、さらには直前まで大規模言語モデル(LLM)などのテキスト処理を専門としていたエンジニアが、同一のロボット開発プロジェクトに参画している。
これが可能なのは、「ロボット基盤モデル(Robot Foundation Model)」の登場とオープンソースの進化により、ハードウェア固有の難解な低レイヤー制御プログラムを書かなくとも、オープンなモデルをAPIやフレームワーク経由で呼び出すだけで、驚くほど簡単に物理アームを動かせるようになったからである。
大学などの教育機関においても、まだ最新のフィジカルAIに対応した教科書や体系的なカリキュラムの整備は追いついていない。しかし、若い研究者や中堅・中小企業の技術者たちは、GitHubなどのオープンソースコミュニティをフル活用し、「まずはオープンソースを試し、小さく動かしてみる」というボトムアップなアプローチから自発的にイノベーションを起こしている。 こうした先進的な研究室(早稲田大学の小方研究室など、博士課程卒業生の3分の1が日立製作所などの協業企業へ就職し活躍しているような産学連携の場)と協業し、共同研究をフックとして技術の入り口を作るアプローチは極めて合理的である。
企業の導入ロードマップを支える「4段階アプローチ」
一方、企業が組織的にフィジカルAIを現場に導入するにあたっては、以下の「4段階のロードマップ」に沿って着実にステップを踏むことが推奨される。
[レベル1] 現場ドキュメントをAIがアクセス(グラブ)できるインフラ環境の構築
[レベル2] 業務プロセスの可視化とエージェント連携
[レベル3] 自律型・主体型エージェントとの協調(バディ化による「暗黙知」の吸い上げ)
[レベル4] AIエージェントとロボットの完全な現場統合、および24時間自動稼働(究極のゴール)
最上段の「レベル4:ヒューマノイドロボットや自律型エージェントを現場に完全導入して使い倒す」という理想を掲げ、いきなり高額なロボット機材を購入しても、プロジェクトはほぼ間違いなく挫折する。なぜなら、いざシミュレータ上で仮想空間を作ろうとした際に、「自社工場の正確な3D CAD図面データすら存在しない(デジタル化されていない)」といった、根本的な前提条件の不足に直面するからである。
企業がまず着手すべきは、もっと手前の「レベル1:現場ドキュメントをAIが適切にアクセス(グラブ)できる状態にすること」である。 RAG(検索拡張生成)などの仕組みを構築し、社内に散逸している紙のマニュアル、作業規定書、過去の障害トラブルシューティング履歴などのドキュメントを徹底的にデジタル化・知識化する。この強固なデータ基盤が整備されて初めて、レベル2のプロセス可視化、レベル3の主体型エージェントによる暗黙知の抽出、そしてレベル4のフィジカルロボットへの脳の移植へと、安全かつ確実に進むことができる。
フィジカルAIを成功させるためには、ロボット単体に目を奪われるのではなく、システム全体のインフラ設計(トータルシステム)として段階的にアプローチすることが不可欠である。
未来への展望:これからのロボティクスがもたらす地殻変動
超少子高齢化社会を生き抜くための「生存戦略」と外販へのビジネス意識
出生率の急激な低下と労働人口の減少という、極めて深刻な危機に直面している日本にとって、フィジカルAIやヒューマノイドロボットの現場導入は、単なる「工場やオフィスの業務効率化・コスト削減」の手段ではない。文字通り「これなしには産業が存続できない、待ったなしの生存戦略」である。
日本企業が取るべき成長シナリオは、国内の過酷な現場でフィジカルAIとロボット技術のパッケージを徹底的に使い倒して磨き上げ、そこで得られた「世界一堅牢な現場ソリューション」を、将来的に同様の人口動態危機を迎える世界各国へと「外販(グローバル輸出)していく」という強いビジネス意識を持って、この5年間の大競争に挑むことである。
ロボティクスのパラダイムシフト:環境がロボットに合わせる時代の終焉
これからのロボティクスは、今までのロボットの常識とは全く異なるパラダイムへと移行する。
従来のロボット制御は、「ロボットを動かすために、ロボットにとって不都合のない専用の環境(段差がない、照明が一定である、配置が固定されている等)」を、人間側が莫大なコストとお膳立てをかけて用意してあげる必要があった。 しかし、フィジカルAIの進化によって、「環境側を変える必要はなく、ロボットの方が人間の生活環境や工場の不整地といった複雑な実世界に、自らの身体(エンボディメント)と自律知能を適応させて入ってきてくれる時代」へと大転換した。これは、人間の労働、社会インフラ、そして身の回りのあらゆる物理的景色を大胆に塗り替える可能性を秘めている。
ルマーダ(Lumada)の先に描かれる世界基盤モデル「IWIM(アイ・ウィム)」
日立製作所がこれまで牽引してきた「ルマーダ(Lumada)」、そしてロボティクスとAIを核とした現場変革を推進する「HAX」の未来には、さらに巨大なテクノロジーの統合が待っている。
今後、高度な自然言語を処理する言語モデルと、複雑な物理法則・リアル世界の挙動を深く理解し予測する物理的なAIモデル群を、包括的に融合した世界基盤モデル「IWIM(アイ・ウィム)」として開発・統合していくアプローチが提示されている。わずか1年のスパンで昨日までの不可能が今日の実用へと変わる、エキサイティングなフィジカルAIの時代。単なる技術研究の枠を超え、実世界を動かすソリューションとしての社会実装が、今まさに始まっている。















